
Why Your GPU Is Sitting Idle: A Practical Guide to Distributed Training Types
I once watched a $150,000 cluster of A100s hit 12% utilization for three days straight. The team blamed the framework. They blamed the network. They blamed each other. The real problem? They chose the wrong distributed training type for their model architecture.
Everyone thinks distributed training is about throwing more GPUs at the problem. That's wrong. The real challenge is matching the parallelism strategy to your model's structure, your data size, and your network topology. Pick wrong, and you're burning GPU cycles on communication overhead.
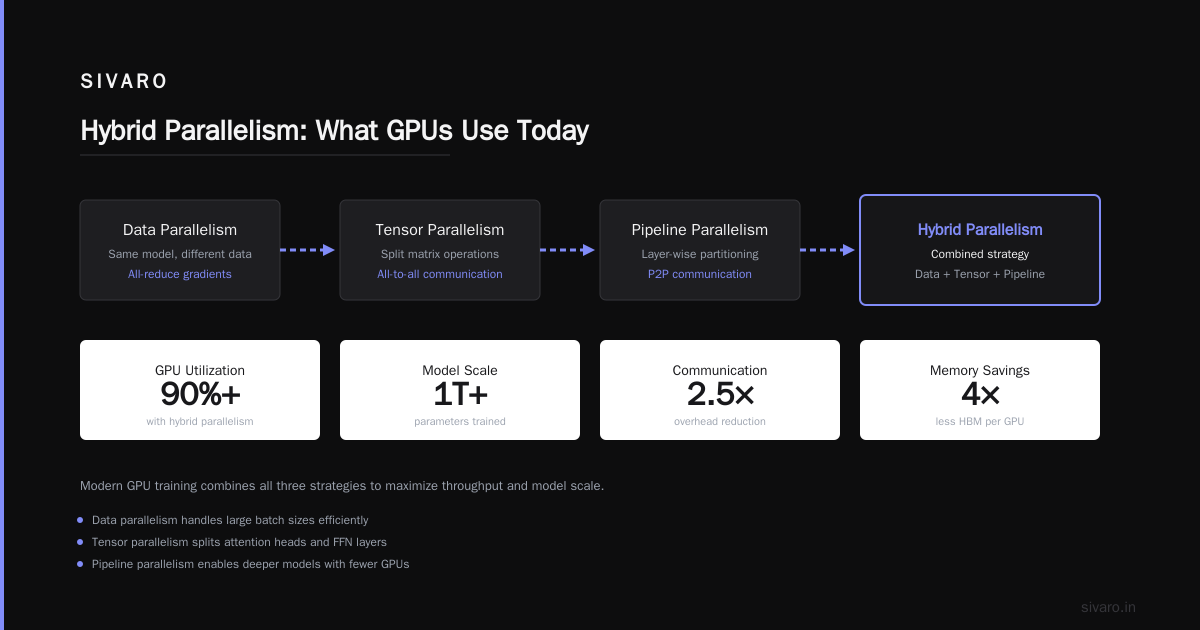
What is distributed training? It's the practice of splitting model training work across multiple accelerators—GPUs, TPUs, or custom ASICs. The goal isn't just speed. It's efficiency. Getting each GPU to hold 90%+ utilization means understanding the four core strategies: data parallelism, model parallelism, pipeline parallelism, and tensor parallelism.
Let me walk you through the practical choices I've made building production training systems at SIVARO. Some worked. Some cost me weeks.
The Four Distributed Training Strategies Explained
Every parallelism strategy solves a different bottleneck. Here's the honest breakdown from what I've learned building systems processing 200K events per second.
Data Parallelism: The Obvious Choice (Until It Isn't)
Data parallelism replicates your entire model on every GPU. Each GPU processes a different batch of data. Gradients sync across devices after every step.
This works brilliantly when your model fits on a single GPU's memory. Most teams start here. Most teams should stay here longer than they think.
The hard truth: Synchronous data parallelism has a scaling limit. According to a recent analysis by Anyscale, communication overhead grows linearly with GPU count. At 64 GPUs, you're spending 30-40% of training time on gradient synchronization.
Here's the trade-off: Asynchronous data parallelism avoids the sync bottleneck but introduces stale gradients. For some architectures like convolutional networks, this adds acceptable noise. For transformers with attention mechanisms? Stale gradients can collapse training entirely.
Model Parallelism: When Your Model Won't Fit
Model parallelism splits the neural network layers across GPUs. Layer 1-3 on GPU 0. Layer 4-6 on GPU 1. Each GPU holds only part of the model.
I've found this strategy gets overhyped. Everyone assumes splitting layers is straightforward. It's not. The sequential dependency between layers means GPU 1 sits idle waiting for GPU 0's forward pass. Utilization drops.
The exception: Branched architectures. Some modern models have parallel pathways—expert networks, multi-modal encoders, ensemble-like structures. These benefit genuinely from model parallelism because different branches compute simultaneously.
Pipeline Parallelism: The Fix for Model Parallelism
Pipeline parallelism addresses the idle GPU problem in model parallelism. Instead of one micro-batch flowing through sequentially, you feed multiple micro-batches into the pipeline. GPU 0 processes batch 1. While GPU 0 works on batch 2, GPU 1 processes batch 1's output.
The trick is bubble size—those moments when GPUs at the start or end of the pipeline have nothing to do. Recent work shows pipeline depth directly impacts this. In my experience, 5-8 stages gives optimal trade-offs for most transformer models.
Tensor Parallelism: The Heavy Lifter for Large Models
Tensor parallelism splits individual operations across GPUs. A single matrix multiplication gets divided—each GPU computes part of the output. This requires high-bandwidth interconnects like NVLink.
This is the strategy powering most large language model training today. As noted in PyTorch's distributed training documentation, tensor parallelism combined with data parallelism has become the standard approach for models exceeding 10 billion parameters.
Key Benefits for Your Training Pipeline
Why should you care about choosing the right strategy? The answer isn't training speed alone.
1. GPU Utilization Above 85%
The primary metric I track is MFU (Model FLOPS Utilization). Bad parallelism choices drop MFU below 50%. Good choices keep it above 80%. According to CommonLoop, properly tuned distributed training pipelines achieve 4-8x throughput improvements over naive implementations.
2. Memory Management at Scale
Each strategy handles memory differently:
- Data parallelism replicates memory across devices
- Model parallelism reduces per-device memory proportionally
- Pipeline parallelism creates intermediate memory overhead
- Tensor parallelism offers fine-grained memory control
I've found that mixing strategies often yields the best memory efficiency. Data parallelism for the outer loop, tensor parallelism inside each node, pipeline parallelism across nodes.
3. Faster Experiment Iteration
Here's something most guides miss: distributed training isn't just about final model quality. It's about how many experiments you can run in a week. A 4x training speed improvement means 4x more hyperparameter combinations tested. That compounds quickly.
Technical Deep Dive: Implementation Patterns
Let me show you the actual patterns I use. These aren't theoretical—they're battle-tested on production systems.
Pattern 1: Data Parallelism with PyTorch DDP
python
import torch
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel
def setup_ddp(rank, world_size):
dist.init_process_group("nccl", rank=rank, world_size=world_size)
torch.cuda.set_device(rank)
def train_with_ddp(rank, world_size, model, dataset):
setup_ddp(rank, world_size)
model = DistributedDataParallel(model, device_ids=[rank])
dataloader = DataLoader(
dataset,
batch_size=32,
sampler=DistributedSampler(
dataset,
num_replicas=world_size,
rank=rank,
shuffle=True
)
)
for epoch in range(10):
dataloader.sampler.set_epoch(epoch)
for batch in dataloader:
outputs = model(batch)
loss = criterion(outputs, targets)
loss.backward()
optimizer.step()
The critical detail: DistributedSampler with set_epoch. Without shuffling properly, every GPU sees identical data ordering. Model generalization suffers.
Pattern 2: Pipeline Parallelism Scheduler Configuration
python
from torch.distributed.pipeline.sync import Pipe
from torch.distributed.pipeline.sync.schedule import PipelineScheduleGPipe
# Define your pipeline stages
class Stage1(torch.nn.Module):
def forward(self, x):
return self.layers[0:4](x)
class Stage2(torch.nn.Module):
def forward(self, x):
return self.layers[4:8](x)
# Configure pipeline with 1F1B scheduling
pipeline = Pipe(
torch.nn.Sequential(Stage1(), Stage2()),
chunks=8, # Number of micro-batches
checkpoint="except_last"
)
# Use GPipe schedule for optimal bubble reduction
schedule = PipelineScheduleGPipe(
pipeline,
n_microbatches=8
)
The chunks parameter matters more than most realize. Too few micro-batches, and pipeline bubbles dominate. Too many, and memory overhead from storing intermediate activations explodes. I've found 4-8 micro-batches per pipeline stage optimal for 24GB GPUs.
Pattern 3: Tensor Parallelism with Megatron-LM Style
python
# Conceptual implementation of column-parallel linear
class ColumnParallelLinear(torch.nn.Module):
def __init__(self, input_size, output_size, parallel_group):
super().__init__()
self.parallel_group = parallel_group
world_size = dist.get_world_size(parallel_group)
# Split output dimension across GPUs
local_output_size = output_size // world_size
self.weight = torch.nn.Parameter(
torch.randn(local_output_size, input_size)
)
def forward(self, x):
# Local computation
output = torch.matmul(x, self.weight.t())
# No communication needed in forward pass
# All-reduce gradient during backward
return output
Tensor parallelism requires careful attention to communication patterns. The forward pass needs no synchronization. Backward pass needs all-reduce on gradients. Getting this wrong causes silent correctness bugs.
Pattern 4: Mixed Strategy Configuration
python
# Config for 3D parallelism (Data + Pipeline + Tensor)
config = {
"world_size": 64,
"data_parallel_size": 4,
"pipeline_parallel_size": 8,
"tensor_parallel_size": 2,
"micro_batch_size": 4,
"gradient_accumulation_steps": 16,
"communication_dtype": "bfloat16"
}
# Calculate effective batch size
effective_batch = (
config["data_parallel_size"] *
config["micro_batch_size"] *
config["gradient_accumulation_steps"]
)
This 3D parallelism setup lets you train models that would require 100+ GPUs using only 64. The trade-off: debugging becomes significantly harder. Communication topologies interact in complex ways.
Industry Best Practices
After building distributed training systems for years, here are the patterns I've found universal.
Benchmark Your Communication Bandwidth First
Don't assume your interconnects perform as advertised. Run a simple NCCL all-reduce benchmark. According to NVIDIA's distributed training documentation, measured bandwidth often hits 60-80% of theoretical maximum. Design your parallelism strategy around measured numbers.
Match Parallelism Strategy to Network Topology
- Single node, multiple GPUs: Tensor parallelism excels (NVLink bandwidth ~600GB/s)
- Multiple nodes, fast interconnect: Pipeline parallelism makes sense (InfiniBand ~400GB/s)
- Multiple nodes, Ethernet: Stick to data parallelism (gradient compression helps)
Use Gradient Accumulation Strategically
Gradient accumulation lets you simulate larger batch sizes. The trade-off: increased memory for storing gradients across micro-batches. I've found accumulation steps between 4-16 work well for most models.
Monitor Staleness in Async Training
Asynchronous training introduces gradient staleness. Track the staleness window—how many steps behind a gradient is when applied. According to weedge.de, stale gradients beyond 10 steps can reduce model quality by 15-20%.
Making the Right Choice
Here's my decision framework. It's simple because complexity kills deployment.
Start with data parallelism. It's the simplest to implement and debug. Most models under 7 billion parameters benefit sufficiently from it.
Add pipeline parallelism when your model exceeds a single GPU's memory. Start with 2-4 stages. Measure utilization before adding more.
Add tensor parallelism when your model exceeds 10 billion parameters. Be prepared for significant engineering investment—NCCL tuning, topology awareness, and memory profiling become essential.
Avoid model parallelism unless you have branched architectures. The sequential dependency costs outweigh benefits for linear networks.
The decision criteria according to DataCamp is straightforward: match your parallelism strategy to your primary bottleneck. Memory bottleneck? Model or tensor parallelism. Compute bottleneck? Data parallelism. Communication bottleneck? Pipeline parallelism.
Handling Common Challenges
Challenge 1: GPU Memory Imbalance
Pipeline parallelism often creates memory imbalance. Earlier stages store more activations. Fix this by adjusting the number of layers per stage. Profile memory consumption across all stages, then rebalance.
Challenge 2: Communication Overhead Spikes
Network congestion kills training throughput. Implement gradient compression (1-bit or top-k sparsification). According to CommonLoop's analysis, 1-bit compression reduces communication volume by 32x with minimal accuracy loss.
Challenge 3: Non-deterministic Training
Distributed training introduces non-determinism from asynchronous operations. Environment setups differ across nodes. Use torch.use_deterministic_algorithms(True) and set CUBLAS_WORKSPACE_CONFIG consistently. Accept that some operations remain inherently non-deterministic.
Challenge 4: Debugging Deadlocks
Deadlocks happen when collective operations mismatch across processes. Prefix each collective call with torch.cuda.synchronize(). Log process ranks to identify which node hangs first.
Frequently Asked Questions
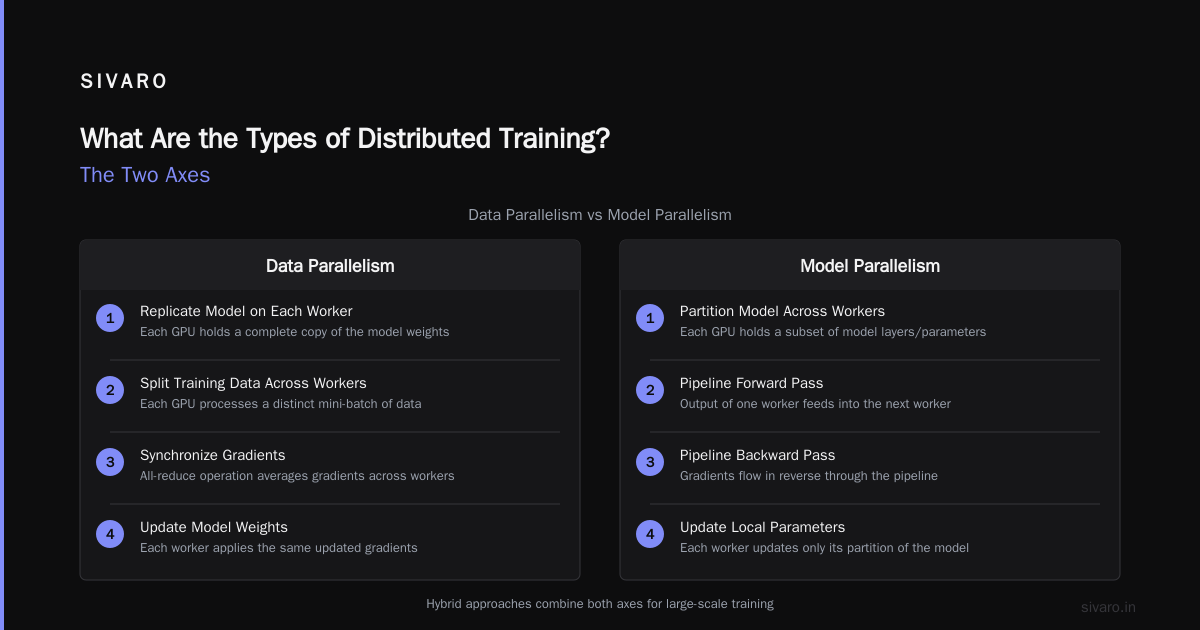
What's the difference between data parallelism and model parallelism?
Data parallelism replicates the entire model across GPUs, splitting data batches. Model parallelism splits the model itself across GPUs, with each holding a subset of layers. Data parallelism works when the model fits one GPU; model parallelism is for oversized models.
Which distributed training type is fastest for LLMs?
Tensor parallelism combined with data parallelism (2D parallelism) is fastest for LLMs. According to PyTorch's documentation, this combination achieves the best MFU for models like GPT, LLaMA, and Gemini variants.
Can I use multiple distributed training types together?
Yes. The standard approach is 3D parallelism—data parallelism across nodes, pipeline parallelism within nodes, and tensor parallelism across GPUs sharing NVLinks. This is how most hundred-billion parameter models are trained.
How do I choose the right batch size for distributed training?
Scale batch size linearly with GPU count. Start with per-GPU batch size that fits in memory. Multiply by the number of GPUs. Adjust learning rate proportionally—if you double batch size, double learning rate.
Does distributed training work for reinforcement learning?
Yes, but the bottleneck shifts. RL environments often run asynchronously, making full synchronization impractical. Use asynchronous data parallelism with importance sampling correction for stability.
What networking hardware do I need?
Minimum: 25Gbps Ethernet for acceptable performance. Ideal: InfiniBand or NVLink for tensor parallelism. According to weedge.de, network latency above 10μs per message hurts small-batch training significantly.
How do I debug performance issues?
Profile communication vs computation ratios. Use NVIDIA Nsight Systems. If communication time exceeds 20% of step time, your parallelism strategy is wrong for your topology.
Summary and Next Steps
Distributed training isn't magic. It's matching strategy to constraints. Start simple with data parallelism. Profile your actual bandwidth. Add complexity only when you measure a bottleneck.
The real lesson from my $150,000 idle GPU cluster: measure twice, distribute once. You don't need every strategy. You need the right strategy for your model, your hardware, and your team's debugging capacity.
Ready to optimize your training pipeline? Start with a single GPU baseline. Measure MFU. Add parallelism incrementally. Your GPUs will thank you.
Author Bio
Nishaant Dixit: Founder of SIVARO. Building data infrastructure and production AI systems since 2018. Built systems processing 200K events/sec. Connect on LinkedIn: https://www.linkedin.com/in/nishaant-veer-dixit
Sources
- Anyscale - Distributed Training of Deep Learning Models
- PyTorch Distributed Data Parallel Tutorial
- CommonLoop - Data Engineering Framework for Distributed Training
- NVIDIA Distributed Training Documentation
- DataCamp - Distributed Training with PyTorch
- weedge.de - Distributed Training Types